2.3.1. Base do Volante
Para a construção de uma base de volante com force feedback, o principal componente a ser definido é o tipo de motor e o sistema de transmissão de força. No mercado, existem quatro principais tipos de construções, cada uma com suas características, vantagens e desvantagens.
Motores Avaliados:
- Volantes com motor DC e engrenagens (Gear-driven): Essa categoria inclui modelos de entrada, como o Logitech G29 e G920. Esses volantes utilizam motores DC com escovas e transmitem a força por meio de engrenagens. Embora apresentem baixo custo e boa disponibilidade, esse tipo de construção possui folgas mecânicas, desgaste com o tempo e torque limitado. Além disso, as engrenagens podem gerar ruído e uma rotação menos suave.
- Volantes com motor DC e correias (Belt-driven): Na categoria intermediária, destacam-se modelos como o Thrustmaster T300 RS, T500 RS, TX e TS-PC Racer. Ainda utilizando motores DC, esses sistemas adotam a transmissão por correias dentadas. Esse tipo de transmissão reduz folgas e ruídos em comparação com engrenagens, oferecendo uma rotação mais suave. Contudo, as correias podem absorver parte dos detalhes do force feedback e ainda têm limitações de torque.
- Volantes com motor brushless de corrente alternada (Direct Drive): Os sistemas Direct Drive utilizam motores brushless de corrente alternada, geralmente com torque elevado e resposta extremamente precisa, pois não há nenhum elemento entre o eixo do motor e o volante. Essa categoria inclui modelos profissionais como Fanatec DD1, DD2, Simucube 2 Sport/Pro/Ultimate e MOZA R9/R16/R21. Essas soluções oferecem o melhor desempenho disponível no mercado, mas exigem maior investimento financeiro e maior domínio técnico, tanto na configuração quanto na montagem de periféricos adicionais.
- Motores brushless de hoverboard no mercado DIY: No cenário de projetos caseiros (DIY), é comum o uso de motores brushless retirados de hoverboards, pela sua construção semelhante aos motores Direct Drive e pela facilidade de obtenção. Quando combinados com drivers como ODrive, VESC ou SimpleFOC, além de codificadores de posição, esses motores conseguem entregar alto torque com excelente suavidade. Embora demandem maior conhecimento técnico na montagem e calibração, são uma solução de ótimo custo-benefício para entusiastas e desenvolvedores independentes.
Metodologia para a escolha do motor:
Durante o desenvolvimento da base de volante com “Force feedback” para o projeto, foram consideradas quatro principais categorias de soluções disponíveis no mercado e na comunidade DIY(Faça você mesmo). Cada uma foi avaliada com base na complexidade mecânica, complexidade eletrônica, custo e realismo do feedback gerado. A escolha do sistema adequado é fundamental para equilibrar desempenho, viabilidade técnica e orçamento disponível. As opções analisadas incluem: sistemas comerciais com motor DC e engrenagens (como o Logitech G29), sistemas intermediários com correias (como os Thrustmaster T300), soluções “Direct Drive” baseadas em “Servo Motores” industriais ou comerciais (como os Fanatec DD1 ou Simucube), e também motores “Brushless de hoverboard”, amplamente utilizados por entusiastas em projetos DIY devido ao seu bom torque e fácil obtenção.
| Tipo de Construção | Complexidade Mecânica (1–5) | Complexidade Eletrônica (1–5) | Custo (1–5) | Realismo do Feedback (1–5) | Pontuação Total |
|---|---|---|---|---|---|
| Motor DC com Engrenagens | 5 | 4 | 3 | 4 | 16 |
| Motor DC com Correia | 4 | 4 | 3 | 3 | 14 |
| Servo Motor (Direct Drive) | 1 | 5 | 5 | 1 | 12 |
| Motor Brushless de Hoverboard | 3 | 3 | 2 | 2 | 10 |
Conclusão para a escolha do motor:
Com base na análise apresentada, o sistema escolhido para a base de volante do projeto foi o motor brushless de hoverboard, devido ao seu bom equilíbrio entre custo, desempenho e acessibilidade técnica. Este tipo de motor, quando utilizado em configuração Direct Drive, pode atingir torques contínuos de até 10 Nm e picos de até 14 Nm, conforme relatado na documentação do projeto “FFB Beast”. dependendo do sistema de resfriamento e alimentação. O motor se destaca por sua construção com estator interno e rotor externo, muito semelhante aos motores Direct Drive comerciais. Isso proporciona uma rotação suave e contínua, com resposta precisa e baixa vibração. A utilização desse motor com controladores como o ODrive ou VESC permite ajustes finos de desempenho, além de integração com sistemas de telemetria, vibração e segurança típicos de simuladores profissionais. Para o projeto do simulador Direct Drive, foi utilizado um motor de hoverboard de 6,5 polegadas com potência nominal de 350 W e torque máximo de 18 Nm. Este tipo de motor brushless, originalmente projetado para veículos de mobilidade pessoal, se mostrou adequado para simular a resistência e resposta de um volante automotivo de forma realista, especialmente em aplicações como simuladores de corrida.
Projeto da estrutura base do volante:
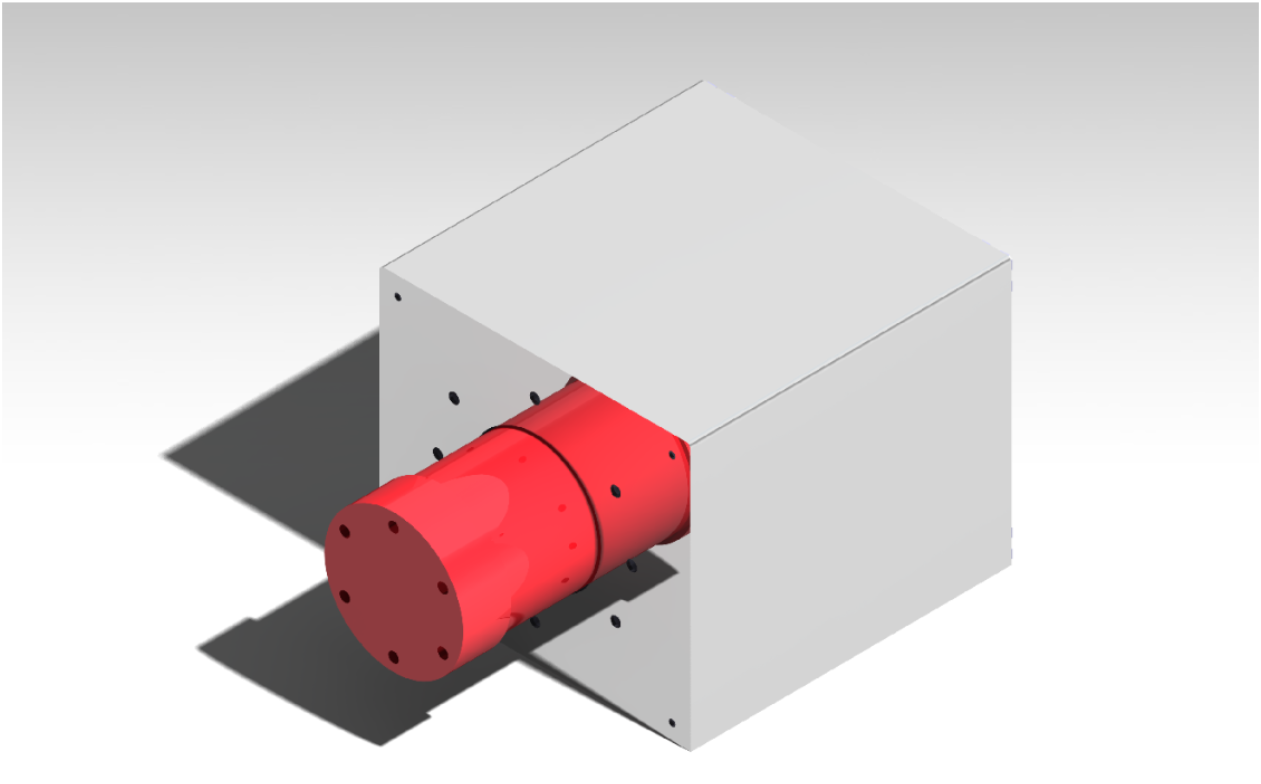
Figura 1. Estrutura mecânica do sistema desenhada no Catia..
A estrutura mecânica do sistema foi montada utilizando perfis de alumínio do tipo V-Slot 20x20 mm, que oferecem rigidez e modularidade para ajustes e expansões. O volante conta com um cubo de saque rápido (quick release), o que facilita a troca de volantes e melhora a ergonomia do conjunto.
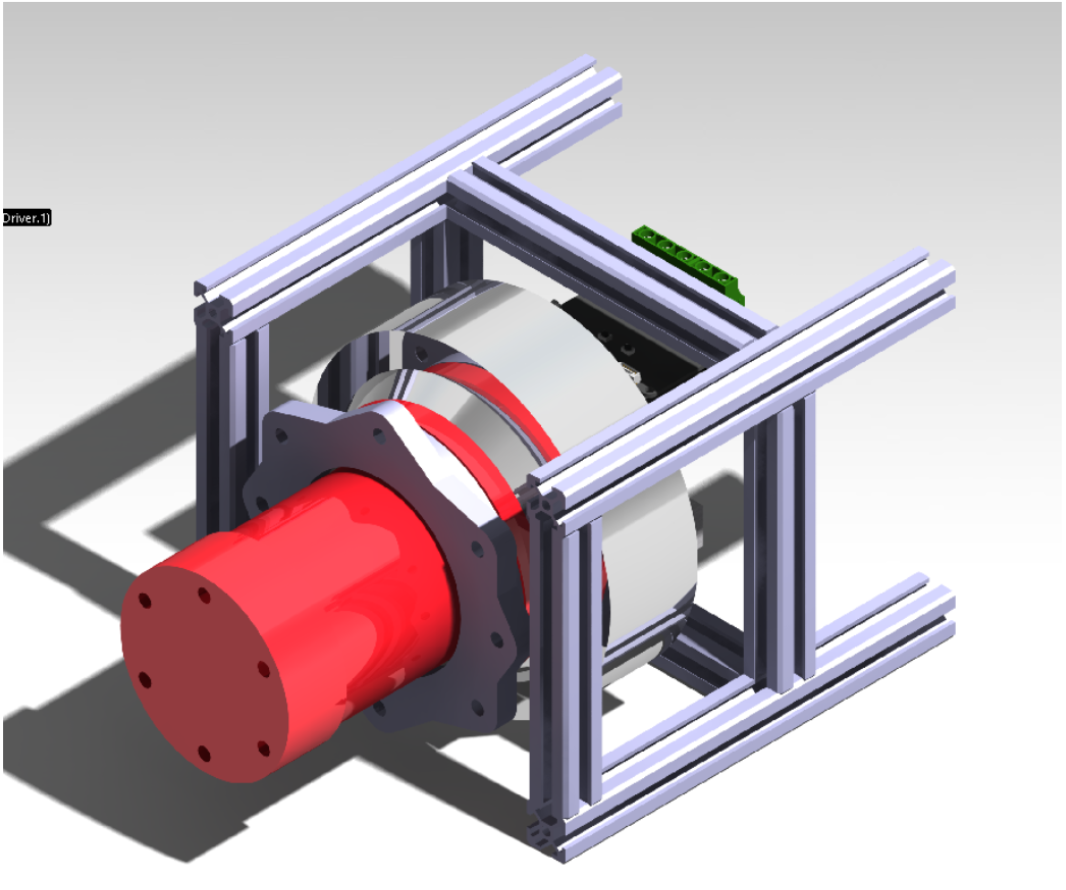
Figura 2. Suporte frontal do motor desenhado no Catia..
O suporte frontal do motor inclui um rolamento 6118, fixado em uma estrutura impressa em 3D. Esse rolamento axial garante o apoio adequado do eixo do motor, minimizando folgas e vibrações, o que contribui para maior precisão e durabilidade do conjunto. O sistema também inclui chapas de aço para reforço estrutural e montagem dos componentes.
Figura 3. Base do Volante desenhado no software Catia V5..
A eletrônica de controle é baseada em uma controladora ODrive v4.2, que permite o controle vetorial do motor com alta precisão, fundamental para simular de forma realista a força contrária no volante. A controladora e o motor são ambos montados em suportes impressos em 3D, projetados com aberturas que possibilitam a ventilação ativa ou passiva dos componentes, garantindo a dissipação térmica adequada durante o uso intenso.
Simulação estrutural da base
A estrutura da base foi avaliada por meio de simulação de carregamento estático no Ansys Mechanical com o intuito de garantir que a estrutura não falhará mediante as condições de uso da base Direct Drive. As referências de carregamento foram obtidas a partir do artigo Cockpit Control Forces or How Robust Do Driver Controls Really Need to Be?, que estuda os requisitos mínimos de robustez para as estruturas dos componentes de controle do piloto (Fox, 2010). Inicialmente, as condições de contorno foram estabelecidas: um suporte fixo do tipo engaste para travar a lateral do mancal do cubo do volante, um momento torsor de 135 Nm aplicado à superfície interna do suporte do eixo SK 20 e uma força remota de 660 N aplicada ao centro do cubo do volante. Essas definições podem ser observadas na Figura 4.
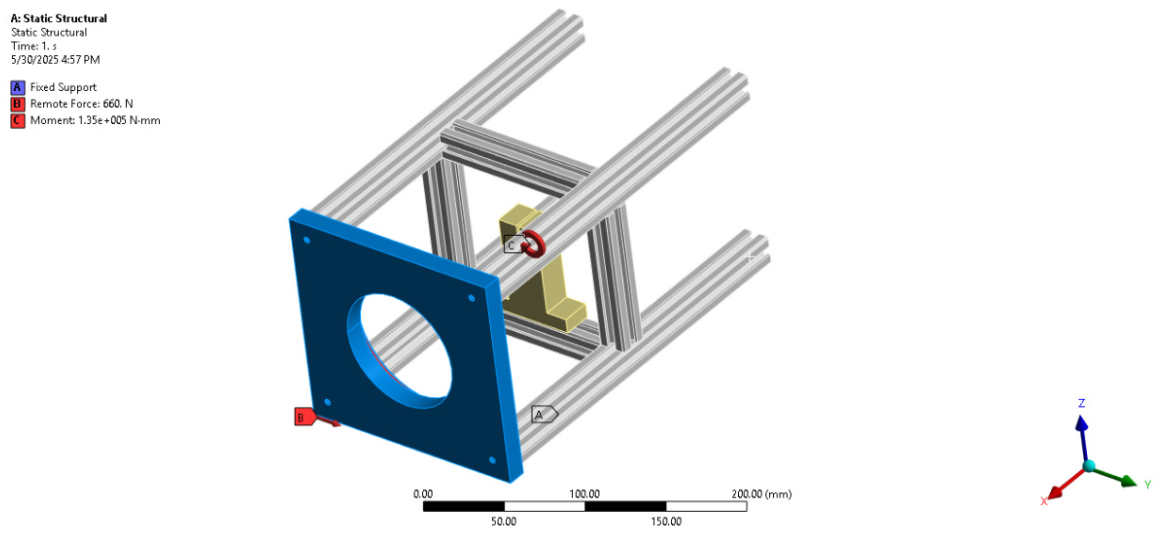
Figura 4. Condições de contorno da simulação estática da base Direct Drive.. Todos os componentes foram dimensionados com alumínio 6061 t6, cujas propriedades mecânicas foram retiradas da biblioteca de materiais do Ansys. A tensão equivalente de von Mises foi avaliada tanto para o suporte do cubo do volante quanto para o mancal do eixo SK 20. A tensão máxima de escoamento de 259 MPa foi utilizada de referência comparativa para a garantia de que os componentes não falhassem. Os resultados podem ser observados nas Figuras 5 e 6.
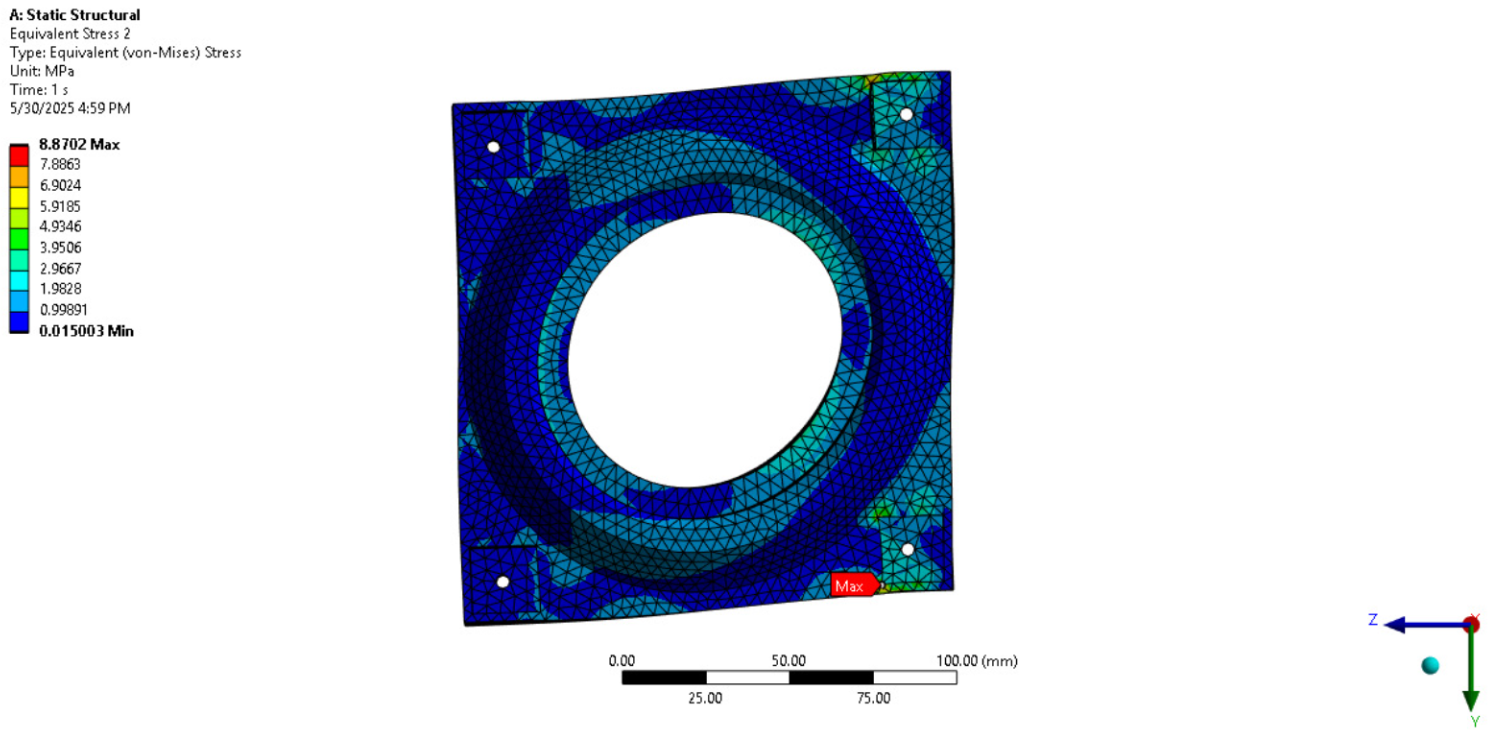
Figura 5. Tensão equivalente de von Mises no suporte do cubo do volante..
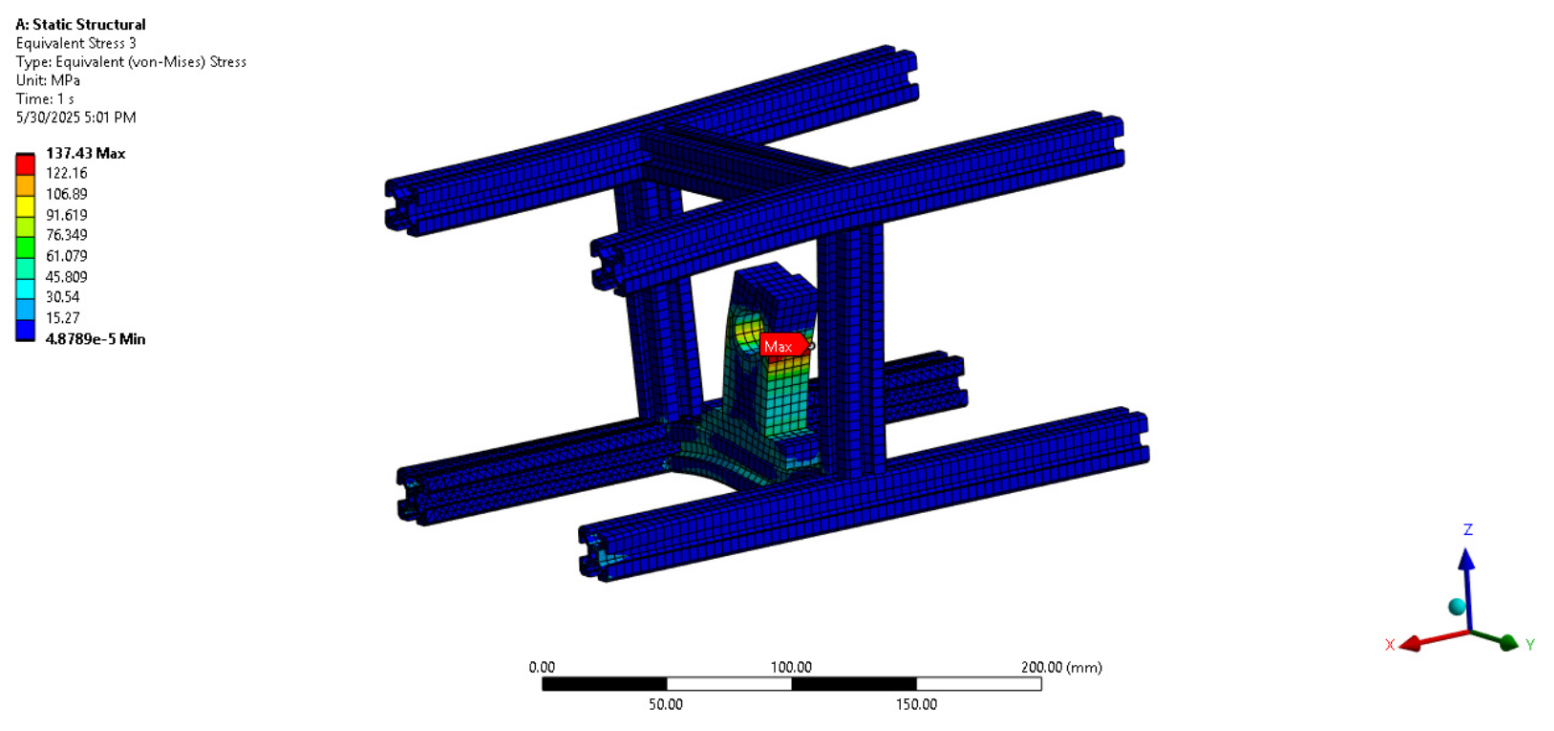
Figura 6. Tensão equivalente de von Mises no suporte do eixo SK 20.. Pode-se concluir que os componentes estruturais da base apresentam robustez suficiente para evitar possibilidades de falhas mecânicas do projeto.